Зубчатые передачи с эксцентриково-циклоидальным зацеплением
1. Общие вопросы передаточных механизмов
Передаточные механизмы играют большую роль в промышленности. Так, к примеру, объём ежегодного производства редукторов (а в них, как известно, задействуются передаточные механизмы) составляет более 200 млрд. долл. Треть этой суммы приходится на автомобильную промышленность (в виде коробок переключения передач, главных редукторов и т.д.). Поэтому созданием компактных конструкций передаточных механизмов, обладающих высокой удельной мощностью активно занимаются технологически развитые страны мира [1, с. 3].
Доля России в мировом объёме выпуска редукторов сейчас мала и всё более сокращается под натиском импортной продукции. Инновации в редукторостроении, как правило, нацелены на улучшение отдельных узлов и деталей и почти не касаются основных принципов эвольвентного зубчатого зацепления, основы которого заложены Леонардом Эйлером еще в 1754 г. Связано это с тем, что преимуществом этого профиля является простота изготовления, достаточно высокая нагрузочная способность, малая чувствительность к неточностям межцентрового расстояния. Однако, эвольвентный профиль удовлетворяет не всем требованиям, предъявляемым к современным передачам. Так, например, в высокомоментных передачах зубья эвольвентного профиля имеют недостаточную контактную прочность, из-за чего могут быстро разрушаться. Контактная прочность зубъев сравнительно более высокая в передачах с зацеплением Новикова, в котором выпуклые профили зубьев одного из колес, очерченные по дуге окружности, контактируют с вогнутыми профилями другого колеса, в результате чего нагрузочная способность передачи повышается в 2-3 раза по сравнению с эвольвентной, а также снижаются потери на трение. Однако и эти передачи имеют ряд недостатков, к примеру, более сложную технологию изготовления [1, с. 3-4; 2-3].
Червячные глобоидные передачи с архимедовой спиралью в поперечном сечении практически не отличаются по своим свойствам от эвольвентных червячных передач, за исключением повышенной несущей способности. К их преимуществам среди прочего относят следующее [1, с. 4]:
1. благодаря малому числу заходов червяка червячная передача позволяет реализовать в одной ступени большие передаточные отношения;
2. обладает высокой плавностью, низким уровнем вибраций и шума.
Недостатком является высокая скорость скольжения вдоль линии зуба, что ведет к повышенной склонности к заеданию (необходимы специальные смазки и материалы для зубчатого венца червячного колеса), снижению КПД и более высокому тепловыделению [1, с. 4].
Зацепление с помощью промежуточных тел качения (т.н. шариковые и роликовые передачи) получило свое развитие, начиная с 50-х гг. прошлого века сразу в нескольких странах. В СССР, в Томском политехническом институте была сформирована научная школа под руководством проф. А.Е. Беляева, заложившая основы теории и практики передач с параллельными и пересекающимися осями с шариковым и роликовым зацеплением. Следующим шагом в развитии шариковых передач стало применение замкнутых пространственных периодических беговых дорожек. В Могилевском машиностроительном институте возникло сразу две научных школы Р.М. Игнатищева и М.Ф. Пашкевича, использующих несколько разные подходы и терминологию. Эксцентриковые шариковые передачи исследованы также В.П. Брюховецким. Разработкой передач с шариковым и роликовым зацеплением за рубежом занимаются фирмы Synkinetics Inc., Compudrive Corporation (США); Axial Wave Drive (Нидерланды); Twinspin (Словакия); японские и китайские исследователи. В связи с тем, что работы по шариковому зацеплению велись параллельно различными разрозненными коллективами, то общей теории зацепления в настоящее время не разработано. Каждый коллектив использовал не только различные теоретические подходы, но зачастую и различную терминологию [1, с. 5]. Основным недостатком зацепления с промежуточными телами качения, ограничивающим его область применения, является невысокий КПД, достигающий 80% в лучших образцах, и ограничения по скорости [1, с. 5].
2. Экцентриково-циклоидальное зацепление и передаточные механизмы на их основе
В последнее время активно усиливаются некоторые факторы, которые создают серьезные предпосылки для развития теории зацепления и создания передаточных механизмов нового поколения. К числу таких факторов можно отнести [1, с. 5-6]:
1) развитие мощных пакетов прикладных математических программ, сделавшее возможным математическое моделирование систем передачи движения в широком смысле;
2) развитие технологии и оборудования металлообработки, которое привело к появлению 4- и 5-координатных станков с ЧПУ, позволяющих создавать передаточные механизмы наперед заданной формой рабочей поверхности в достаточно серьезных вариациях.
Развитие возможностей технологов и возможностей конструкторов, основанных на совершенствовании методов математического и компьютерного моделирования с опорой на базовые положения теоретической механики, аналитической и дифференциальной геометрии, создает предпосылки для создания передаточных механизмов нового поколения [1, с. 6, 10].
В 2007 г. томские конструкторы предложили принципиально новую разработку эксцентриково-циклоидального (ЭЦ) зацепления, которая давала возможность получения в одной ступени повышенного передаточного отношения [1, с. 5, 10]. В отличие от классического эвольвентного зацепления, в котором профили зубьев изготавливаются на основе эвольвенты окружности, в ЭЦ-зацеплении профили колес – циклоидальная кривая и эксцентрически повёрнутая окружность. Это зацепление может быть реализовано как с помощью составных колес, образованных повернутыми друг относительно друга прямозубыми венцами (рис. 1а), так и в виде непрерывного винтового эксцентрика и сопряжённого с ним винтового циклоидального колеса (рис. 1б).
|
|
|
|
(а) |
(б) |
|
Рис. 1. ЭЦ-зацепление [1, с. 11]: А – с составными венцами, б – с криволинейными винтовыми зубьями |
|
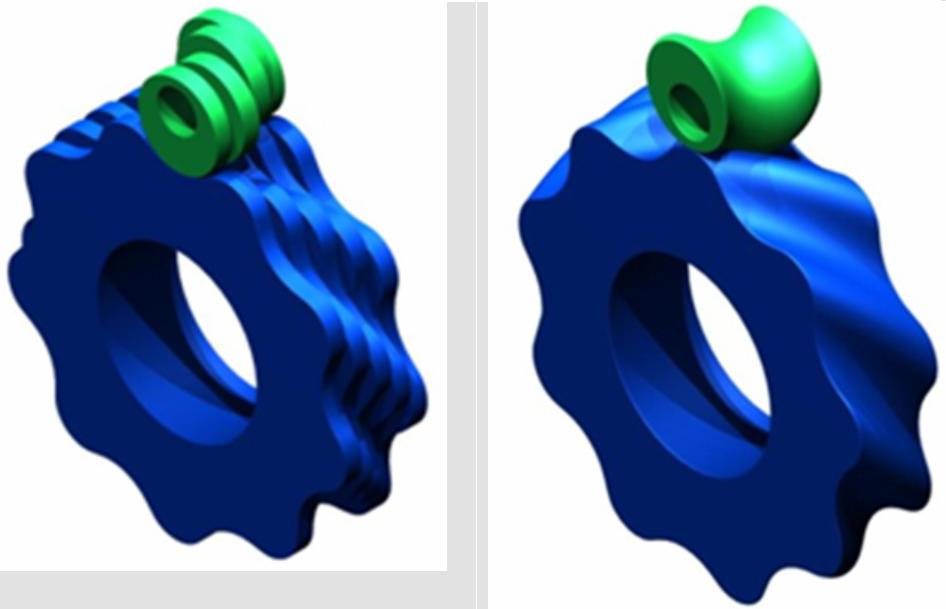
Механизм с зацеплением, представленным на рис. 1а, проще в изготовлении. Криволинейные зубья второго варианта механизма (рис. 2б) технологически сложнее, однако имеют большой приведенный радиус кривизны, что увеличивает контактную прочность зацепления, а форма зуба обеспечивает большую изгибную прочность. При этом в обоих случаях сечение, перпендикулярное осям вращения колёс имеет вид, изображенный на рис. 2. [1, с. 11].
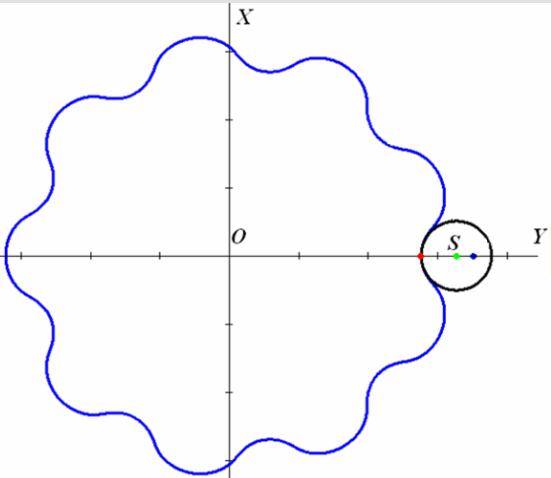
Рис. 2. Сечение, перпендикулярное осям вращения колёс [1, с. 11]
Эксцентриково-циклоидальные редукторы в сравнении с эвольвентными получают такую высокую прочность, которая позволяет им передавать до 7 раз более высокий крутящий момент (при равной массе сравниваемых редукторов). Это одно из основных достоинств ЭЦ-зацеплений [1, с. 15-16].
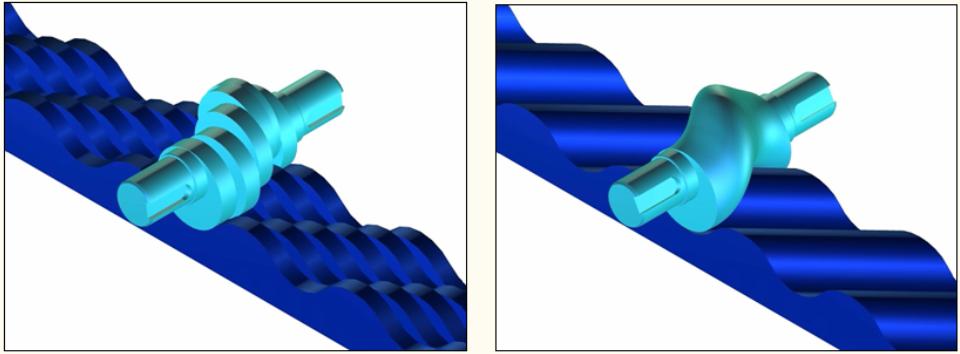
Возможна также и реечная передача, использующая ЭЦ-зацепление и преобразующая вращательное движение в поступательное и наоборот (рис. 3). Подобный механизм может быть использован вместо обычных реечных механизмов в линейных приводах станков, в устройствах рулевого управления автомобилей, а также в грузоподъемной технике (реечные домкраты и т.п.). Механизм имеет повышенную нагрузочную способность зацепления при тех же габаритах, а также возможность получения сравнительно малых скоростей перемещения рейки независимо от габаритов вращающегося колеса (а зависящих только от углового шага рейки) [1, с. 15].
|
(а) |
(б) |
Рис. 3. Реечное зацепление [1, с. 15]:
а – с составными венцами, б – с криволинейными винтовыми зубьями
Шнековая коническая косозубая передача с ЭЦ-зацеплением представлена на рис. 4. [1, с. 16-17].
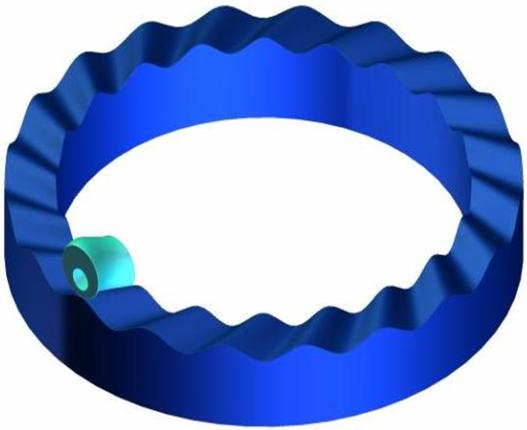
Рис. 4. Коническая передача с ЭЦ-зацеплением [1, с. 16]
Планетарная дисковая передача с ЭЦ-зацеплением представлена на рис. 5. В ней движение передаётся от центрального колеса на кольцо, на котором закреплены оси сателлитов. Центральное колесо выполнено в форме винтового эксцентрика, а сателлиты – в виде косозубых винтовых колёс, профили которых – циклоидальные кривые (рис. 5).
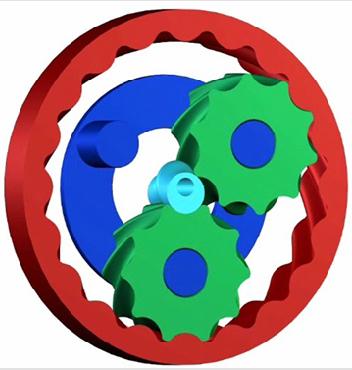
Рис. 5. Планетарная передача с ЭЦ-зацеплением и косозубыми винтовыми колёсами [1, с. 19]
Список источников и литературы
1. Щербаков, Н.Р. Математическое и компьютерное моделирование динамических систем передачи движения: автореф. … докт. физ.-мат. наук: Специальность 05.13.18 - Математическое моделирование, численные методы и комплексы программ. – Томск, 2009. – 30 с.
2. Решетов, Д.Н. Детали машин. - М.: Машиностроение, 1989. – 496 с.
3. Иванов, М.Н. Детали машин. – М.: Высш. школа, 1978. – 352 с.
- Войдите, чтобы оставлять комментарии